Using Rubik's cube to improve and evaluate robot manipulation
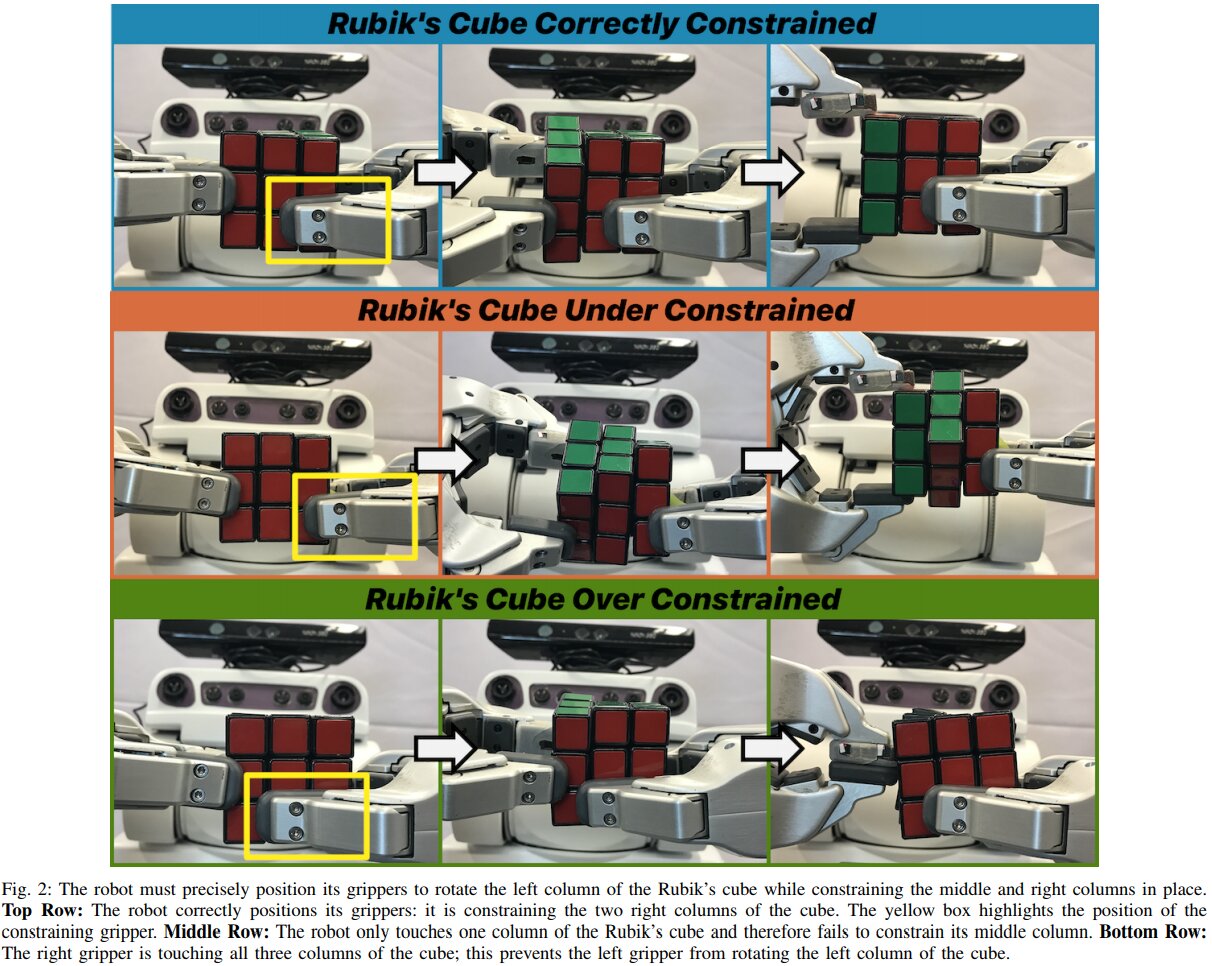
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on the Rubik
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on the Rubik's Cube, the well-known 3D combination puzzle invented by the Hungarian sculpture and architect Ernő Rubik.

Capturing the dynamic target by the robot manipulator in high-dimensional configuration space map - Jiali Pi, Weiming Zhang, Shifu Zhang, Chunming Pi, Changhua Xie, 2020

quad arm robot solves the rubik's cube in about three seconds
Another Rubik's Cube Robot Is Simple But Slow
How OpenAI Used Meta-Learning to Build a Robotic Hand that can Solve the Rubik's Cube, by Jesus Rodriguez, DataSeries
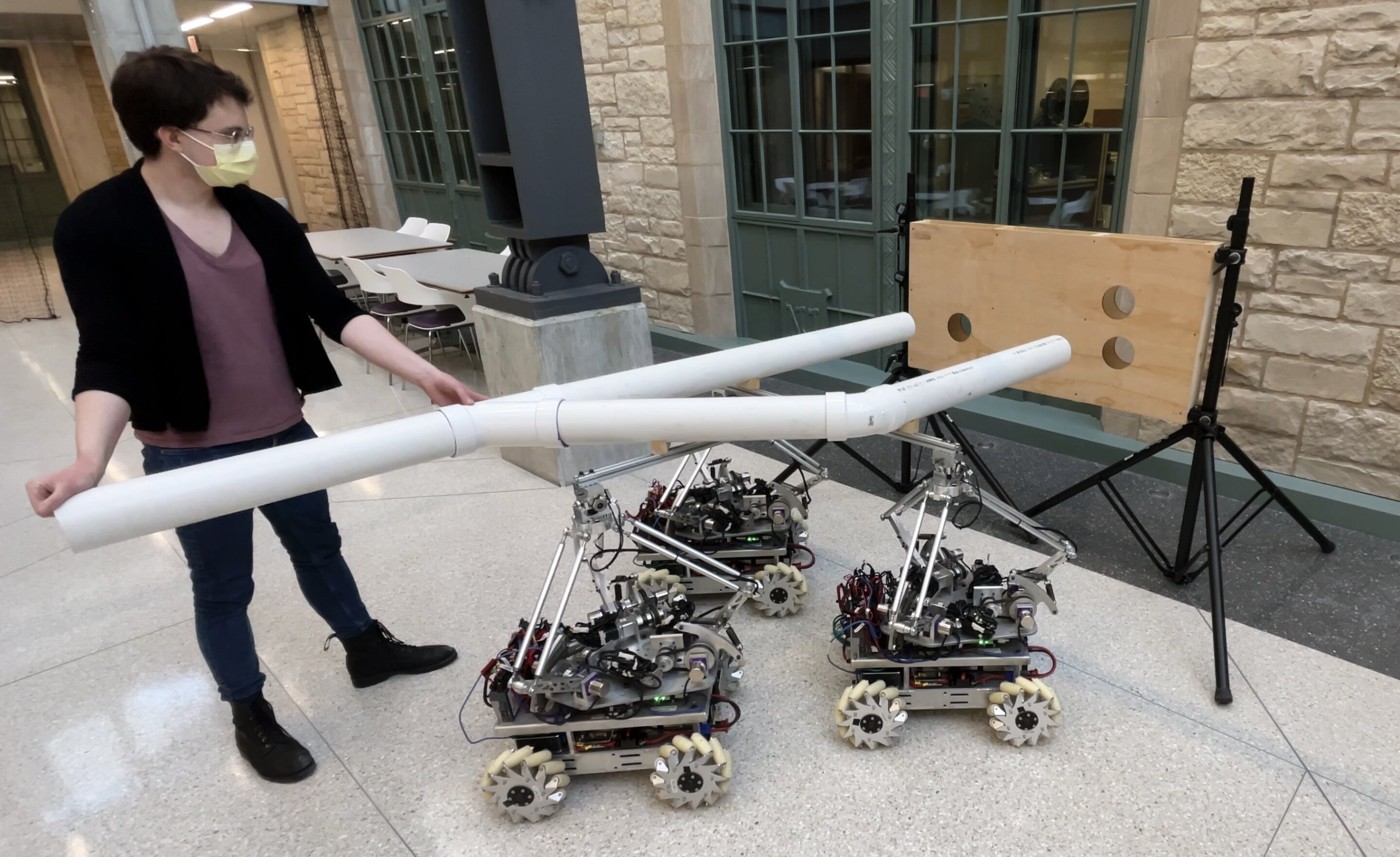
The Omnid Mocobots: New mobile robots for safe and effective collaboration

How OpenAI Used Meta-Learning to Build a Robotic Hand that can Solve the Rubik's Cube, by Jesus Rodriguez, DataSeries
Autonomous grasping robot with Deep Reinforcement Learning

Figure 13 from Solving Rubik's Cube with a Robot Hand

A robot hand taught itself to solve a Rubik's Cube after creating its own training regime

Rise of the robogeeks

From zero to Rubik's cube solving robot, by Stevan Kostoski