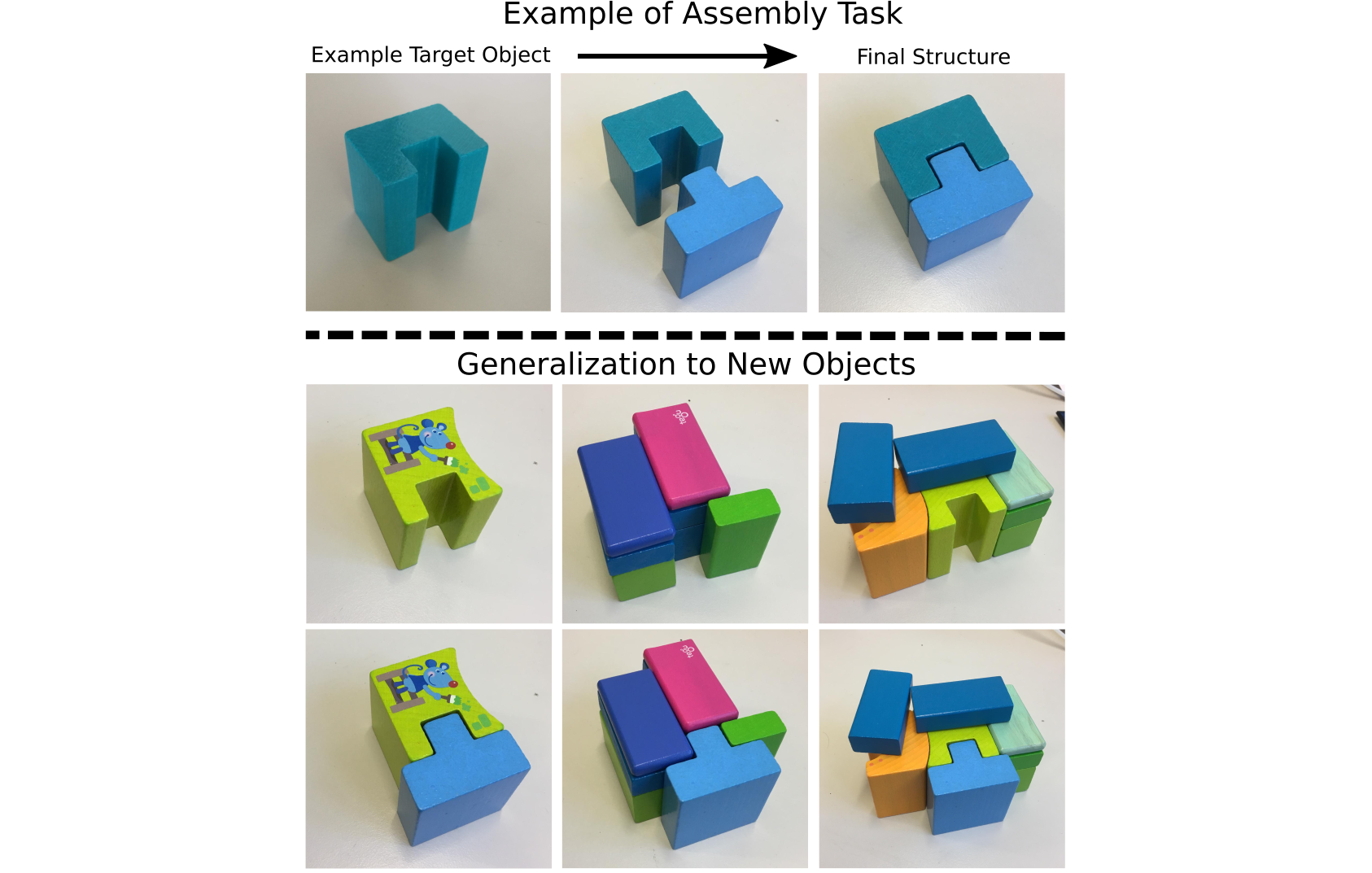
Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation

PDF] Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation

Expeditious Object Pose Estimation for Autonomous Robotic Grasping
Reconstruction-based 6D pose estimation for robotic assembly

AttentionPose: Attention-driven end-to-end model for precise 6D pose estimation

Figure 5 from Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects
Estimating 6D Pose from Regular 2D Images with AI

6D Pose Estimation
Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation
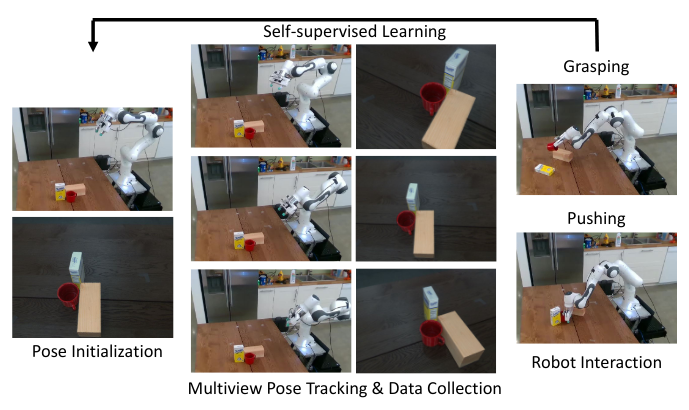
Self-supervised 6D Object Pose Estimation for Robot Manipulation

Pose estimation approach: Heatmaps and PAFs are inferred for each
Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review

AttentionPose: Attention-driven end-to-end model for precise 6D pose estimation
Frontiers Single-Camera Multi-View 6DoF pose estimation for robotic grasping
J. Imaging, Free Full-Text